16. Autonomous Navigation ใน Gazebo
Autonomous Navigation หรือการนำทางอัตโนมัติ เป็นหัวใจสำคัญของหุ่นยนต์เคลื่อนที่อัตโนมัติ (Autonomous Mobile Robot: AMR) ซึ่งต้องสามารถรับรู้สภาพแวดล้อม, วางแผนเส้นทาง และเคลื่อนที่ไปยังจุดหมายโดยอัตโนมัติ โดยอาศัยเซ็นเซอร์ เช่น LiDAR, กล้อง 3D, และ IMU ประกอบกับอัลกอริทึมการนำทาง เช่น SLAM (Simultaneous Localization and Mapping) และ Path Planning
ในหัวข้อที่ 11 เราได้เรียนรู้เกี่ยวกับการติดตั้งแพ็คเกจที่จำเป็น และวิธีใช้งาน Gazebo เพื่อจำลองสภาพแวดล้อมสำหรับหุ่นยนต์ ในบทนี้ เราจะศึกษาเกี่ยวกับการใช้งาน Gazebo ซึ่งเป็นตัวจำลองสภาพแวดล้อมเสมือน (Simulation) ที่สามารถใช้ทดสอบระบบนำทางของหุ่นยนต์โดยไม่ต้องใช้งานฮาร์ดแวร์จริงโดยใช้แพ็กเกจ TurtleBot3 Simulation ในการสาธิต
(https://emanual.robotis.com/docs/en/platform/turtlebot3/simulation/)
16.1. สร้างแผนที่ SLAM (Simultaneous Localization and Mapping)
การสร้างแผนที่และวางแผนเส้นทาง โดยใช้ SLAM (Simultaneous Localization and Mapping) เพื่อให้หุ่นยนต์สามารถสร้างแผนที่ของพื้นที่และกำหนดตำแหน่งของตนเองภายในแผนที่
16.1.1. เปิดโลกจำลองใน Gazebo
เปิด Terminator 3 หน้าต่าง (ในกรณีที่มีหน้าต่างอยู่ก่อนหน้าปิดแล้วเปิดใหม่):
Terminator หน้าต่างที่ 1 รันคำสั่งดังนี้ :
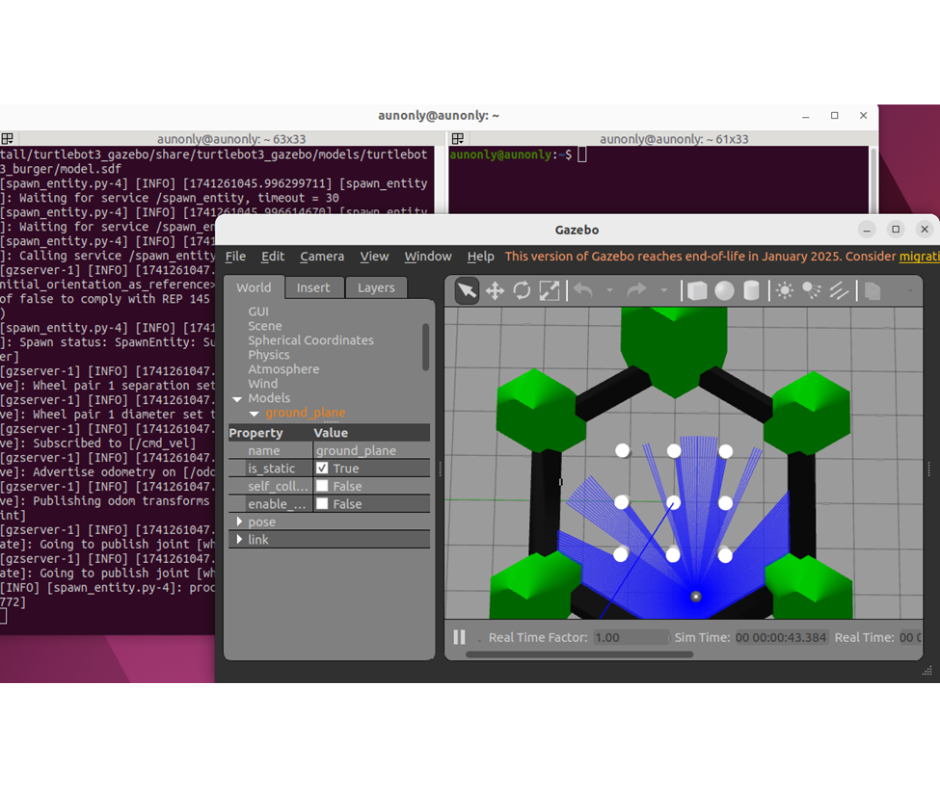
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
เพื่อทำการเปิด Gazebo จำลองในระบบ Simulator จะปรากฏดังภาพ
16.1.2. รัน SLAM Node
Terminator หน้าต่างที่ 2 รันคำสั่งดังนี้:
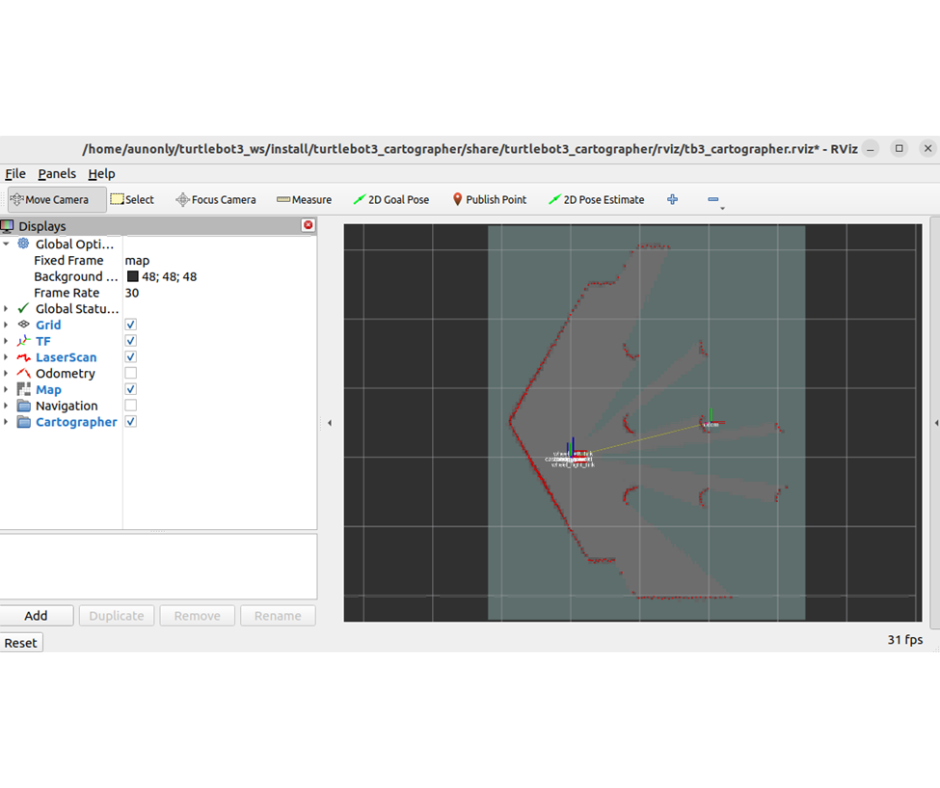
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
คำสั่งนี้เป็นการ รันระบบ SLAM (Simultaneous Localization and Mapping) โดยใช้แพ็กเกจ turtlebot3_cartographer ใน ROS 2 ที่ชื่อว่า cartographer.launch.py และกำหนดให้ใช้เวลาในโหมดจำลอง (use_sim_time:=True).
จะปรากฏดังภาพ
16.1.3. ควบคุมหุ่นยนต์ด้วย Teleoperation
เพื่อให้หุ่นยนต์สามารถเคลื่อนที่ไปรอบๆ และสร้างแผนที่ ต้องใช้ Teleoperation Node เพื่อควบคุมหุ่นยนต์
Terminator ที่ 3 รันคำสั่งดังนี้:
ros2 run turtlebot3_teleop teleop_keyboard
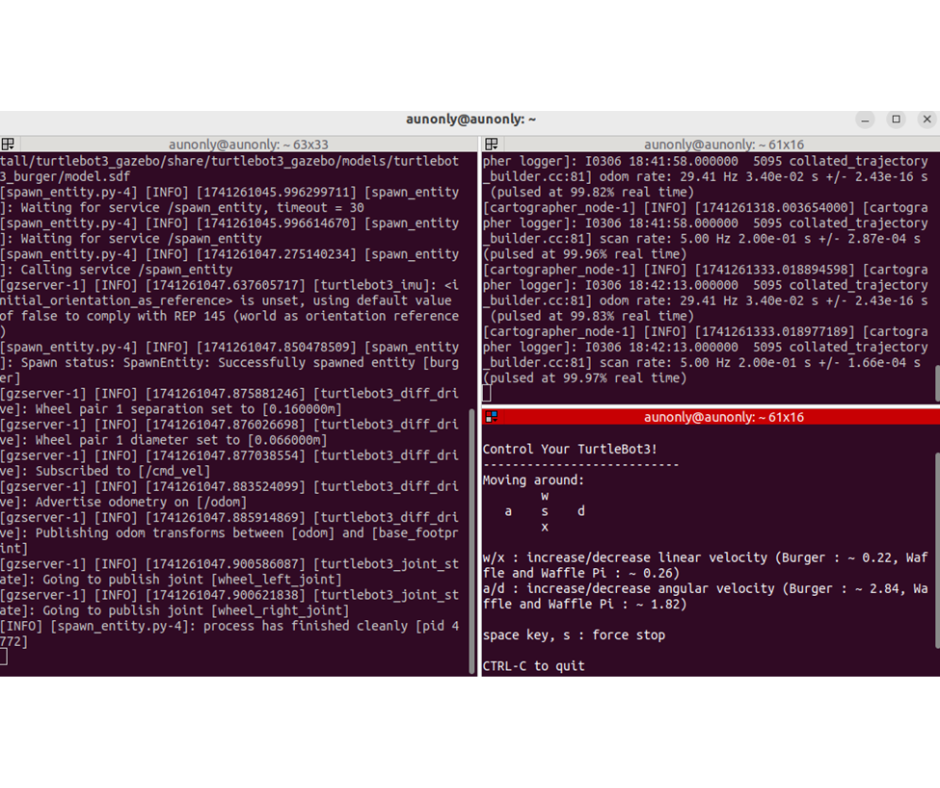
เมื่อรันคำสั่งนี้ จะสามารถใช้ แป้นพิมพ์ เพื่อควบคุมการเคลื่อนที่ของหุ่นยนต์
w : เดินหน้า
x : ถอยหลัง
a : เลี้ยวซ้าย
d : เลี้ยวขวา
space, s : หยุด
(ถ้ากด w, x ซ้ำๆ จะเป็นการเดินหน้าพร้อมกับเร่งสปีดในแนวเชิงเส้น)
(ถ้ากด a, d ซ้ำๆ จะเป็นการเดินหน้าพร้อมกับเร่งสปีดในแนวเชิงมุม)
ภารกิจ : เคลื่อนที่ไปรอบๆ เพื่อให้ LiDAR เก็บข้อมูลและสร้างแผนที่ได้รอบห้องแบบรูปด้านล่าง
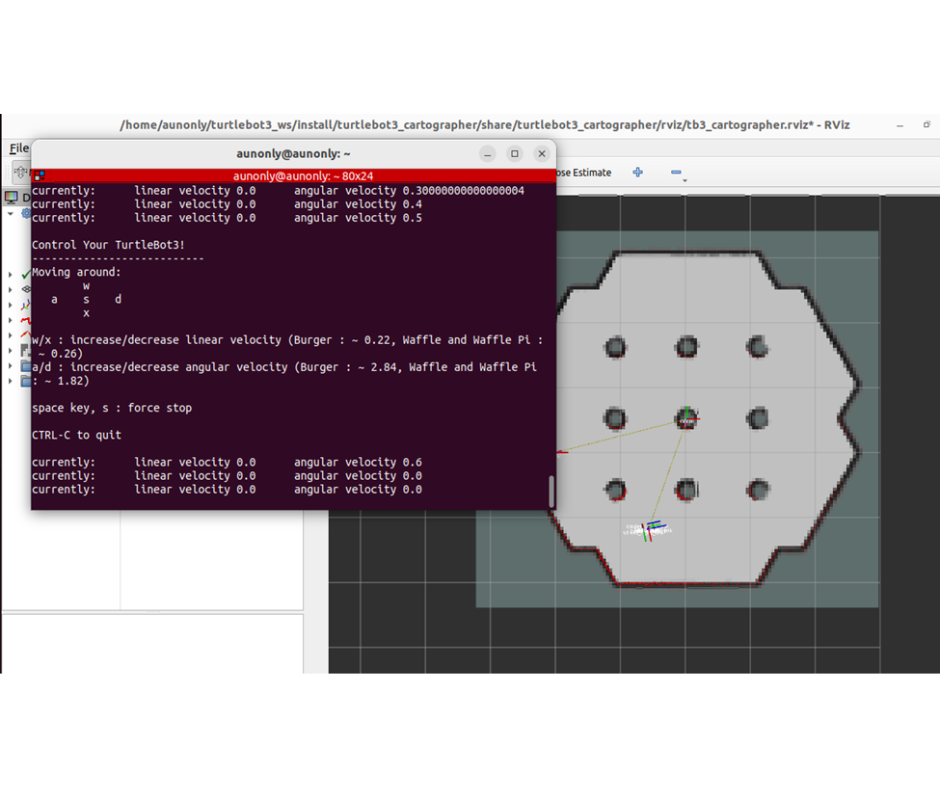
16.1.4. บันทึกแผนที่
เมื่อสามารถเก็บแผนที่ได้ดังรูปด้านบน ให้เปิด Terminator หน้าต่างที่ 4 แล้วรันคำสั่งดังนี้: Terminator ที่ 3 รันคำสั่งดังนี้:
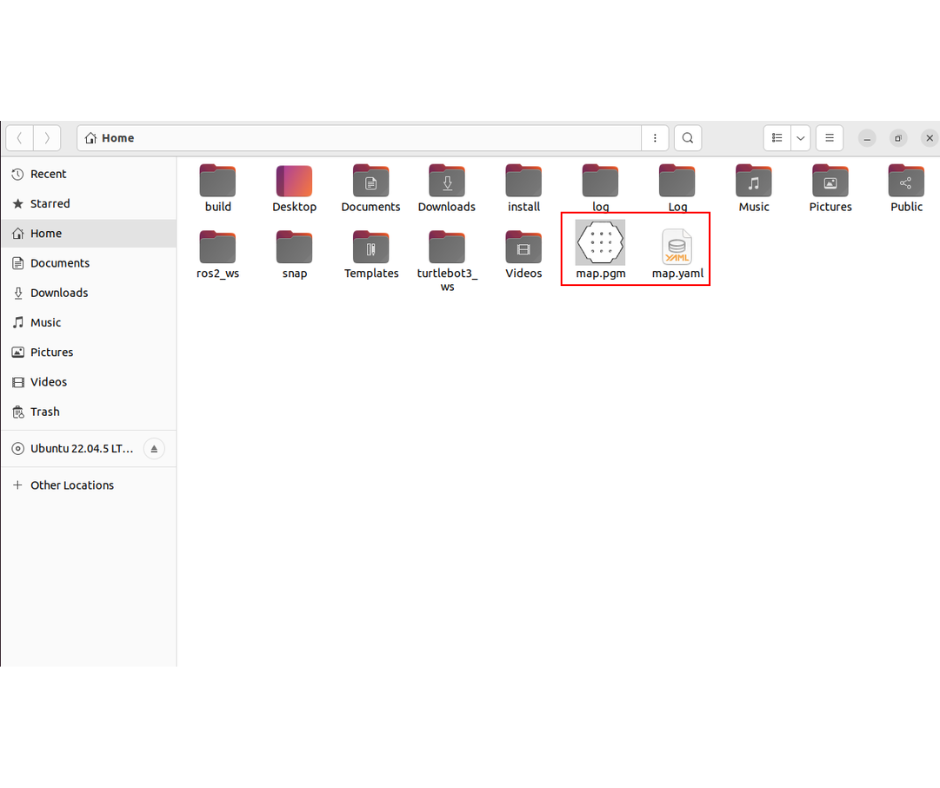
ros2 run nav2_map_server map_saver_cli -f ~/map
เมื่อรันคำสั่งเซฟแผนที่ จะมี ไฟล์ .pgm และ .yaml ปรากฏขึ้นมาใน Home โฟลเดอร์
16.2. Navigation2 (Nav2)
เป็นการนำทางอัตโนมัติหลังจากที่สร้างแผนที่แล้ว (ปิดหน้าต่าง Terminator เดิมให้หมดจากหัวข้อ 12.1 สร้างแผนที่ SLAM และเปิด Terminator ขึ้นมาใหม่ 2หน้าต่าง)
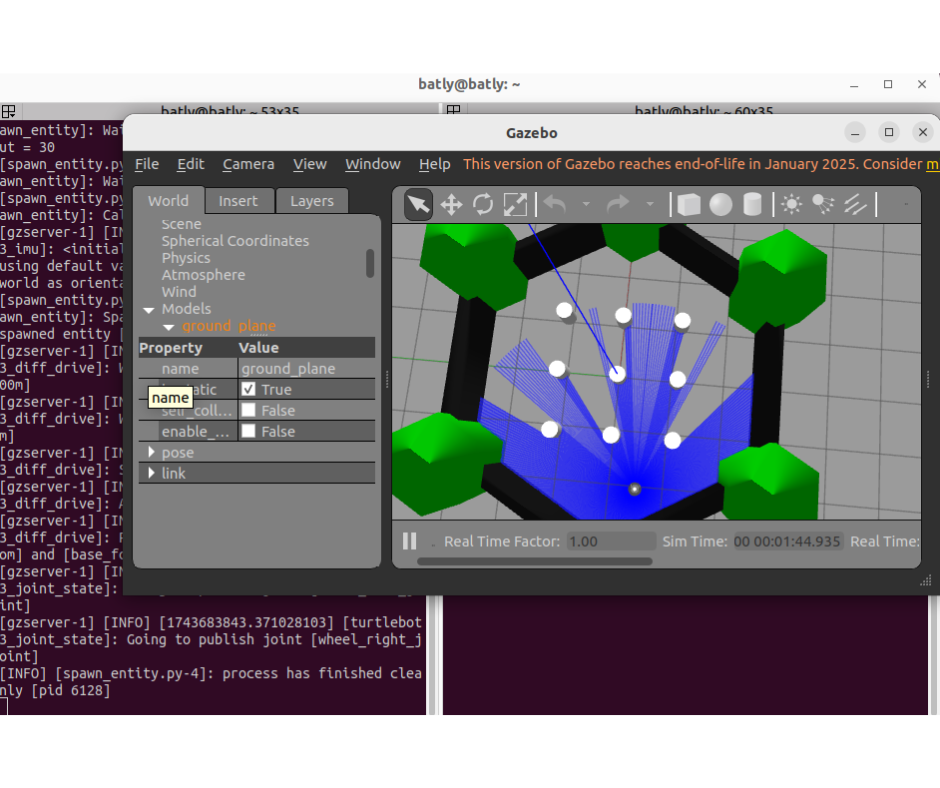
16.2.1. เปิดโลกจำลองใน Gazebo Terminal หน้าต่างที่ 1 ให้รันคำสั่งดังนี้ :
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
คำสั่งนี้เป็นการ เปิดโลกจำลอง (Simulation Environment) ของ TurtleBot3 โดยใช้แพ็กเกจ turtlebot3_gazebo ใน ROS 2 และรันไฟล์ Launch ชื่อ turtlebot3_world.launch.py
16.2.2. รัน Navigation2 Node Terminal หน้าต่างที่ 2 ให้รันคำสั่งดังนี้ :
ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True
คำสั่งนี้ใช้สำหรับ เปิดระบบ Navigation ของ TurtleBot3 โดยใช้แพ็กเกจ turtlebot3_navigation2 ใน ROS 2 และรันไฟล์ Launch ที่ชื่อว่า navigation2.launch.py พร้อมกำหนดให้ใช้เวลาจำลอง (use_sim_time:=True).
หลังจากรันคำสั่งนี้ ระบบ Navigation2 จะเริ่มทำงาน
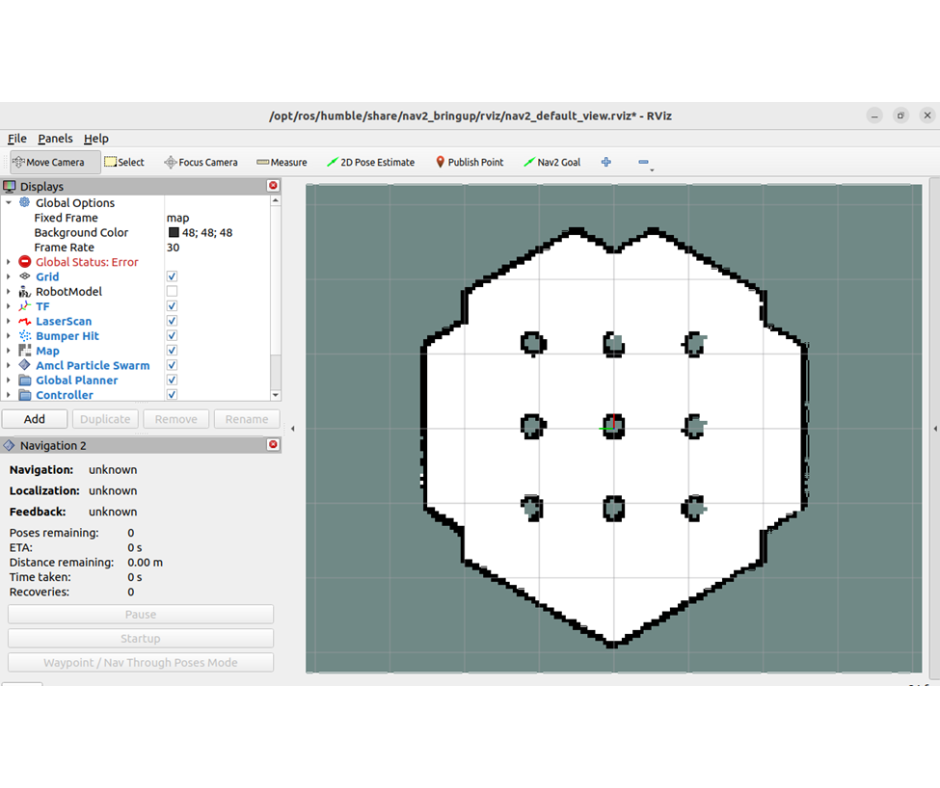
16.2.3. กำหนดตำแหน่งเริ่มต้นของหุ่นยนต์ (Estimate Initial Pose)
ก่อนเริ่มนำทาง ต้องตั้งค่าตำแหน่งเริ่มต้นของหุ่นยนต์ใน RViz2 เพื่อให้ตรงกับตำแหน่งจริงของมันในแผนที่
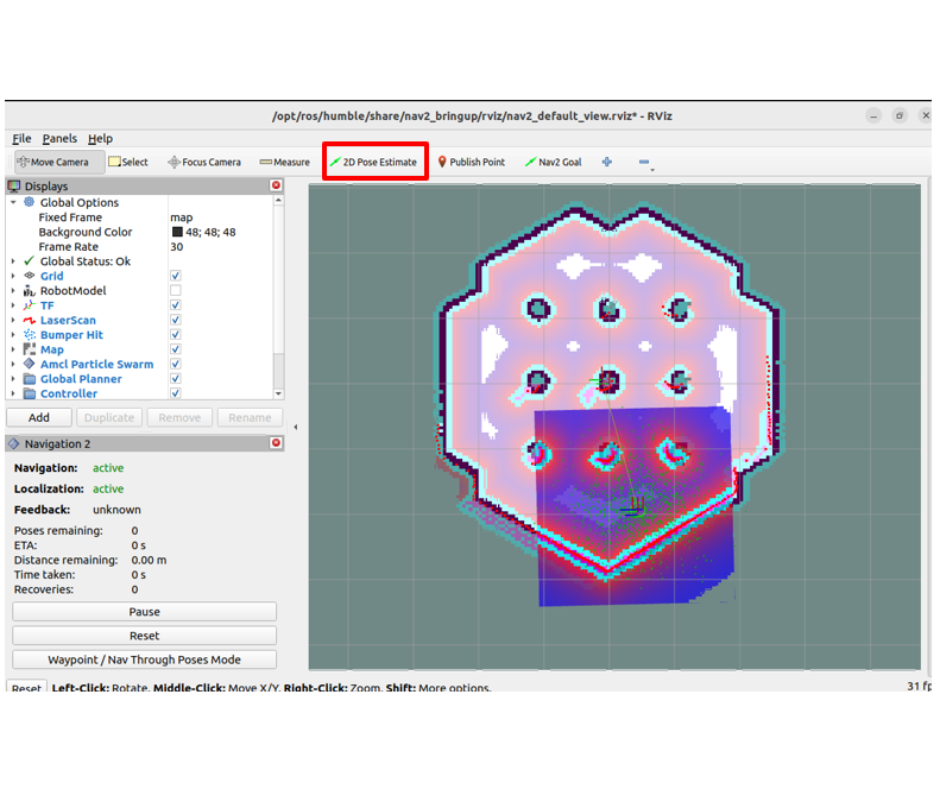
วิธีตั้งค่า Initial Pose
กดปุ่ม "2D Pose Estimate" ในเมนูของ RViz2
คลิกบนแผนที่ตำแหน่งที่หุ่นยนต์อยู่จริงใน Gazebo และลาก ลูกศรสีเขียว ไปในทิศทางที่หุ่นยนต์กำลังหันหน้า
ทำซ้ำจนกว่า Laser จะซ้อนทับกับแผนเหมาะสม
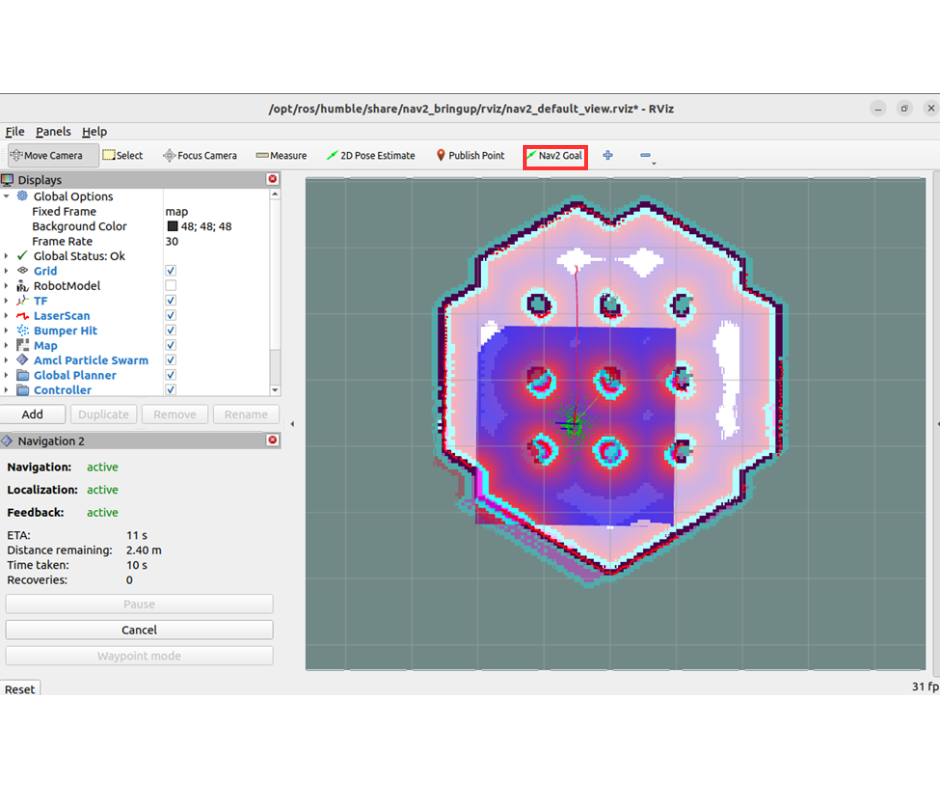
16.2.4. ตั้งค่าจุดหมายปลายทาง (Set Navigation Goal)
เมื่อกำหนดตำแหน่งเริ่มต้นเรียบร้อยแล้ว ให้ตั้งค่าจุดหมายปลายทางให้หุ่นยนต์นำทางไปยังตำแหน่งที่ต้องการ
วิธีตั้งค่า Navigation Goal
กดปุ่ม "Nav to Goal" ใน RViz2
คลิกบนแผนที่ในตำแหน่งที่ต้องการให้หุ่นยนต์เคลื่อนที่ไป (คลิกบนพื้นที่ว่าง ที่ไม่ใช่นอกแผนที่ หรือ พื้นที่มีเสา)
ลาก ลูกศรสีเขียว ไปในทิศทางที่หุ่นยนต์ควรหันหน้า
หุ่นยนต์จะเริ่มเคลื่อนที่ไปยังจุดหมายปลายทางโดยอัตโนมัติ