12. Custom Service
ในบทนี้เราจะเรียนรู้การสร้าง Service แบบกำหนดเอง (Custom Service) ซึ่งเป็นรูปแบบการสื่อสาร ระหว่างโหนด (Node) ในลักษณะ “ถาม–ตอบ” (Request–Response)
12.1. สร้างไฟล์.srv
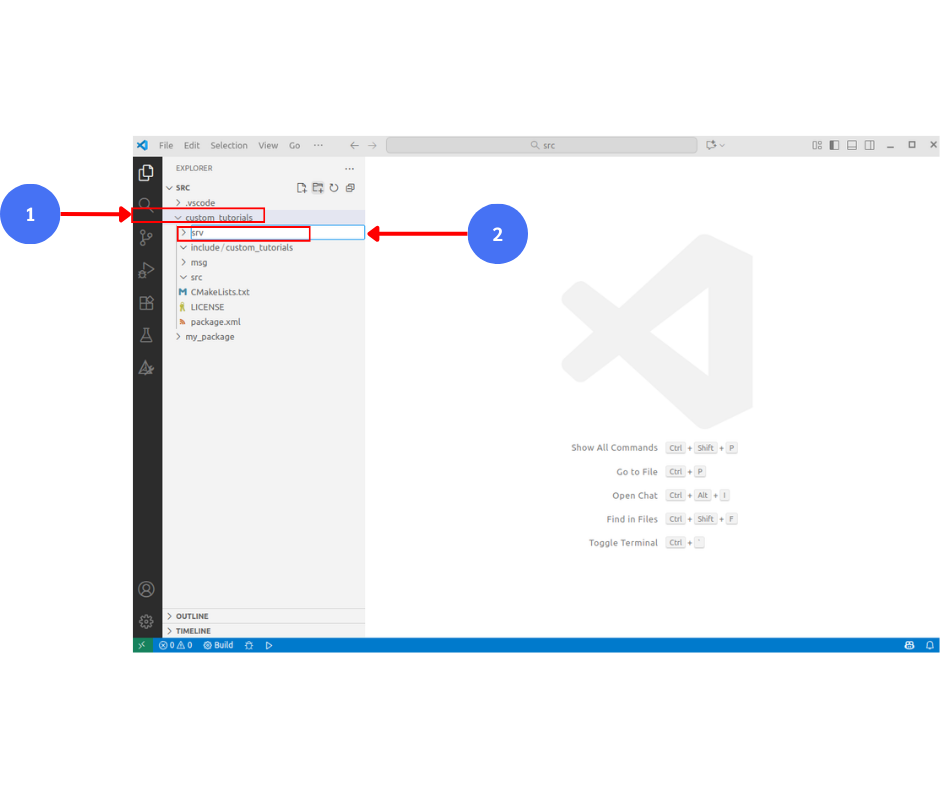
เปิด VS Code ขึ้นมา สร้างโฟลเดอร์ srv
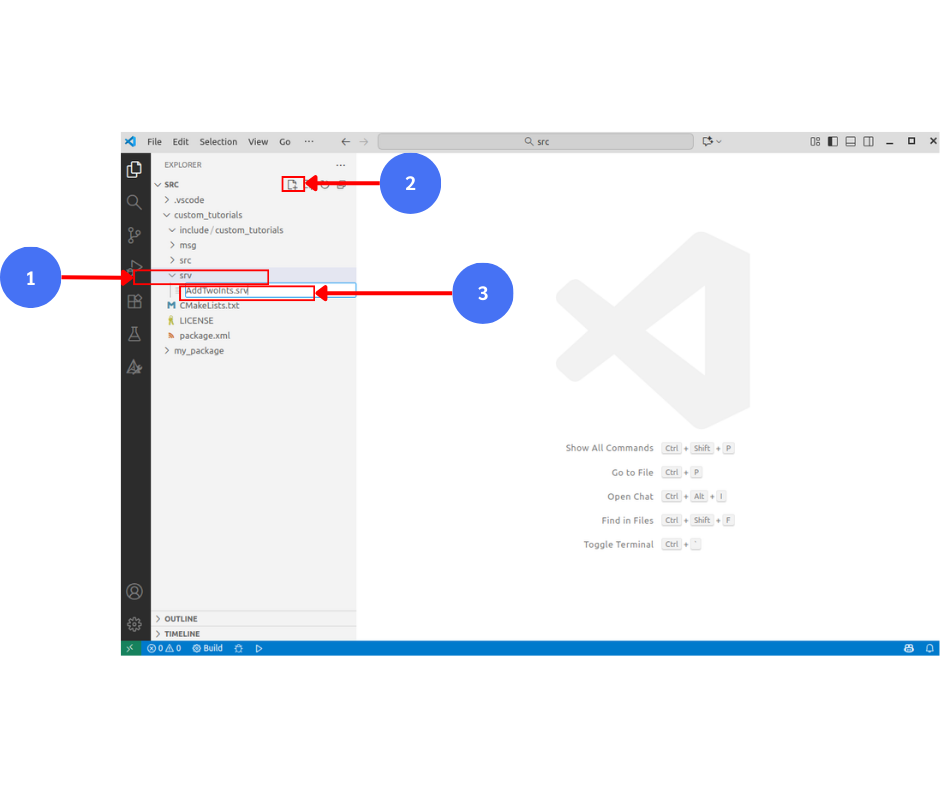
สร้างไฟล์ AddTwoInts.srv
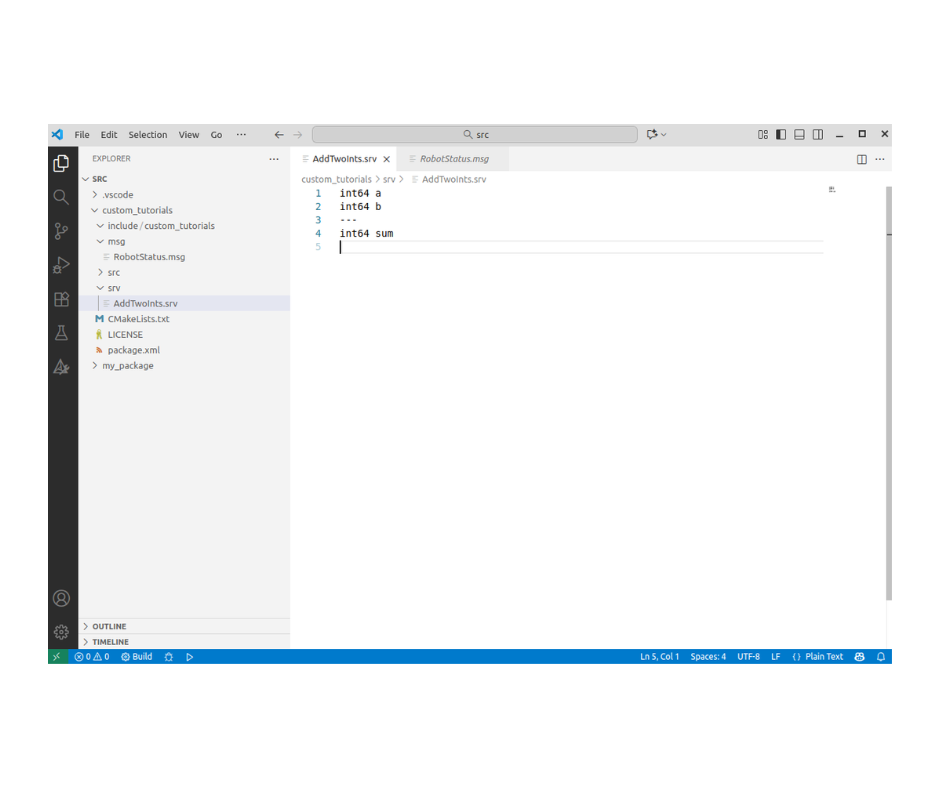
เพิ่มเนื้อหาในไฟล์ AddTwoInts.srv
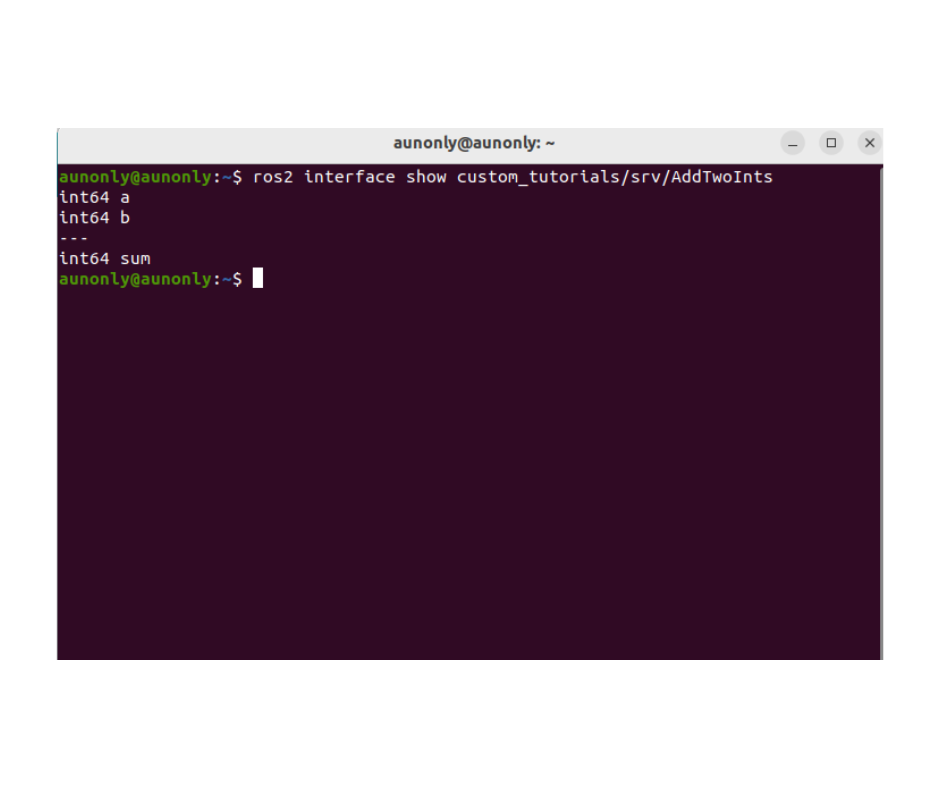
int64 a
int64 b
---
int64 sum
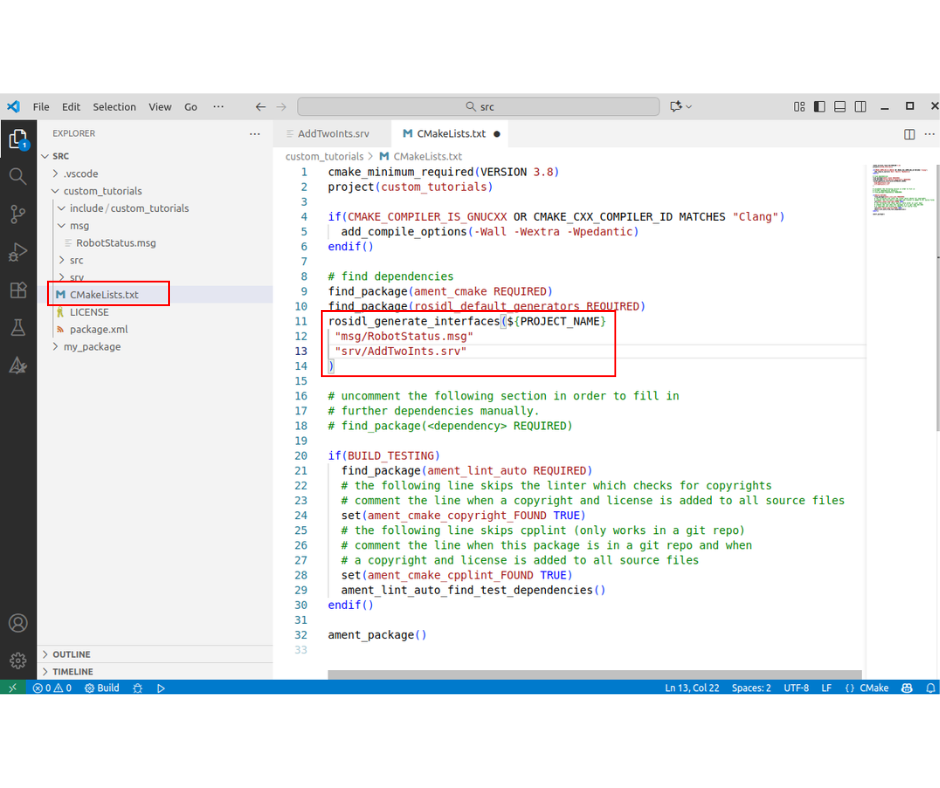
เพิ่มเนื้อหาใน CMakeList.txt
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/RobotStatus.msg"
"srv/AddTwoInts.srv"
)
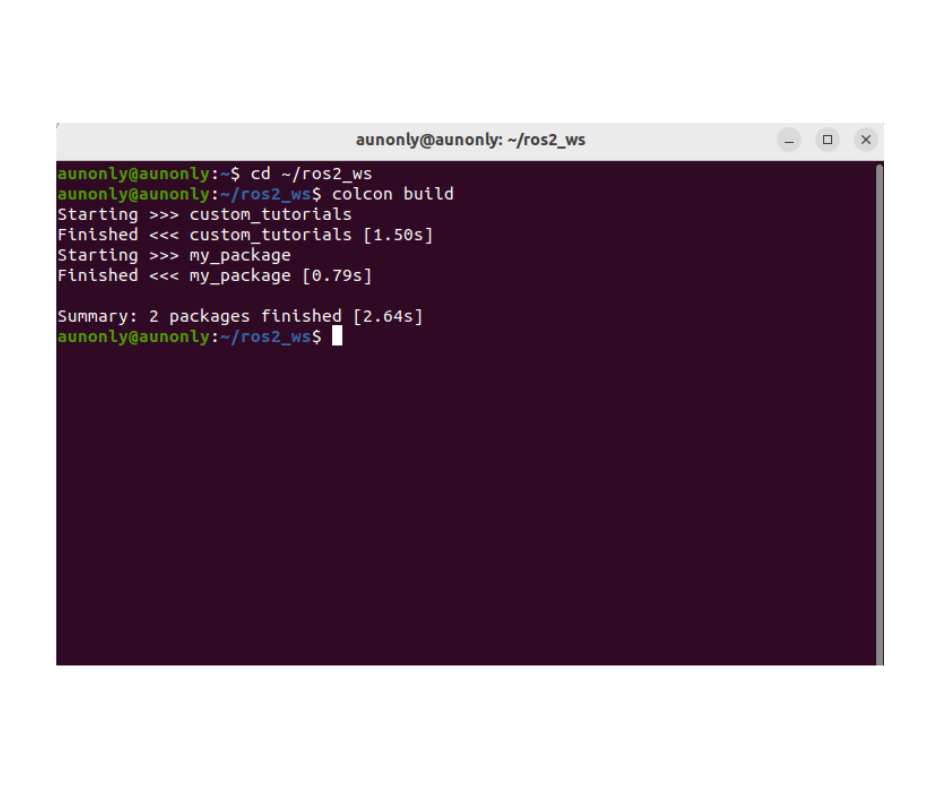
เปิด Terminal ขึ้นมา เพื่อทำการ คอมไพล์
cd ~/ros2_ws
colcon build
ตรวจสอบว่า service ถูกสร้างสำเร็จ
ros2 interface show custom_tutorials/srv/AddTwoInts
12.2. ทดลองใช้ Custom Service ที่เราสร้างไว้ (AddTwoInts.srv)
สร้าง โหนด add_two_ints_server.py และ add_two_ints_client.py ภายใน my_package
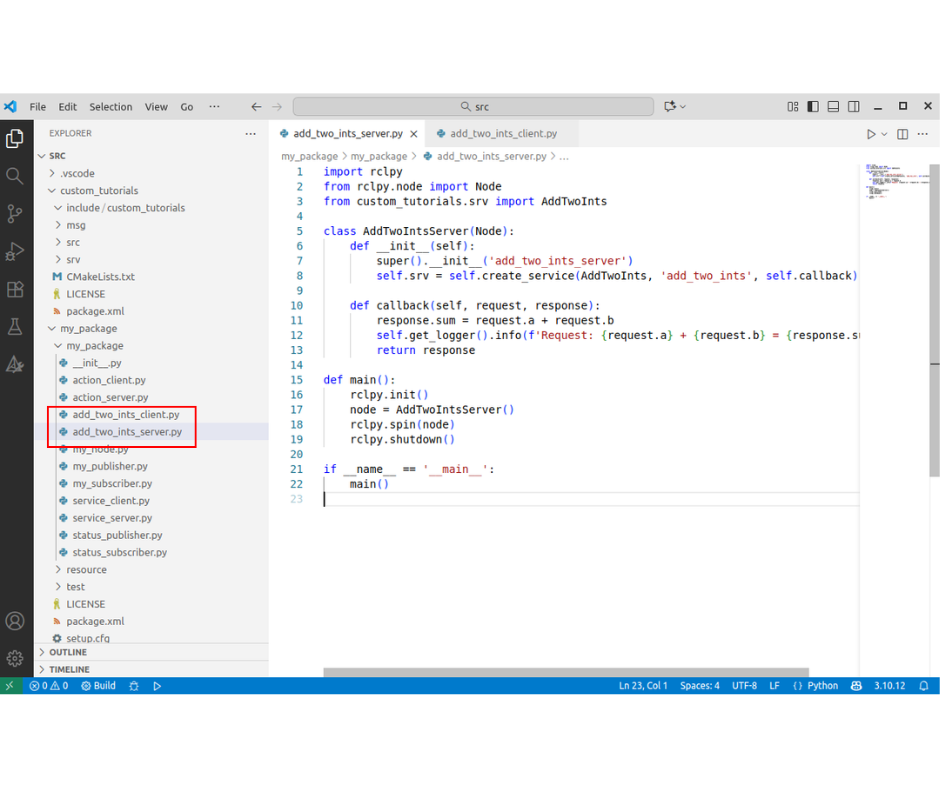
ตัวอย่างโค้ด add_two_ints_server.py
import rclpy
from rclpy.node import Node
from custom_tutorials.srv import AddTwoInts
class AddTwoIntsServer(Node):
def __init__(self):
super().__init__('add_two_ints_server')
self.srv = self.create_service(AddTwoInts, 'add_two_ints', self.callback)
def callback(self, request, response):
response.sum = request.a + request.b
self.get_logger().info(f'Request: {request.a} + {request.b} = {response.sum}')
return response
def main():
rclpy.init()
node = AddTwoIntsServer()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()
ตัวอย่างโค้ด add_two_ints_client.py
import rclpy
from rclpy.node import Node
from custom_tutorials.srv import AddTwoInts
class AddTwoIntsClient(Node):
def __init__(self):
super().__init__('add_two_ints_client')
self.client = self.create_client(AddTwoInts, 'add_two_ints')
while not self.client.wait_for_service(timeout_sec=1.0):
self.get_logger().info('Waiting for service...')
def send_request(self, a, b):
req = AddTwoInts.Request()
req.a = a
req.b = b
future = self.client.call_async(req)
rclpy.spin_until_future_complete(self, future)
return future.result()
def main():
rclpy.init()
node = AddTwoIntsClient()
response = node.send_request(3, 7)
node.get_logger().info(f'Result: {response.sum}')
rclpy.shutdown()
if __name__ == '__main__':
main()
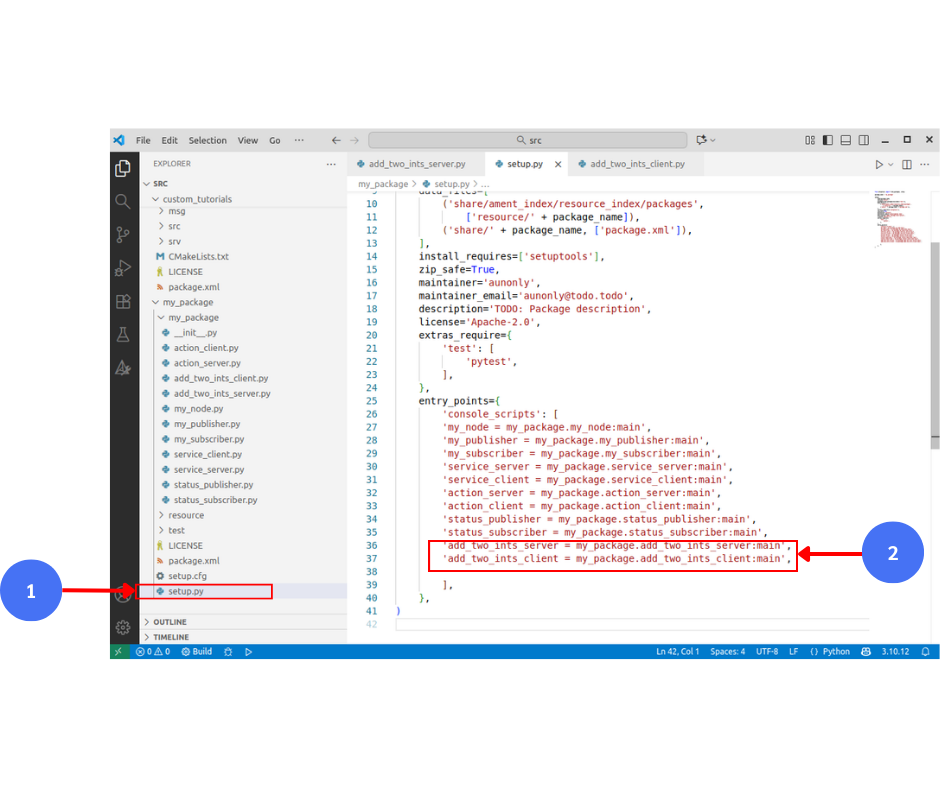
ตั้งค่า setup.py
'add_two_ints_server = my_package.add_two_ints_server:main',
'add_two_ints_client = my_package.add_two_ints_client:main',
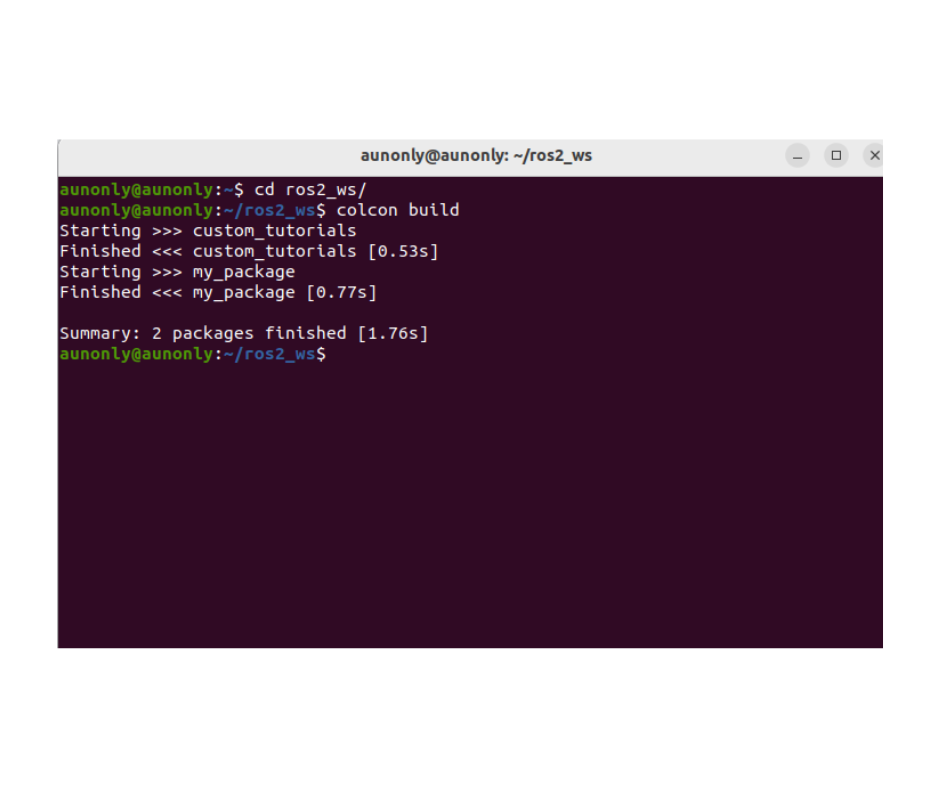
เปิด Terminal ขึ้นมา ทำการ คอมไพล์
cd ~/ros2_ws
colcon build
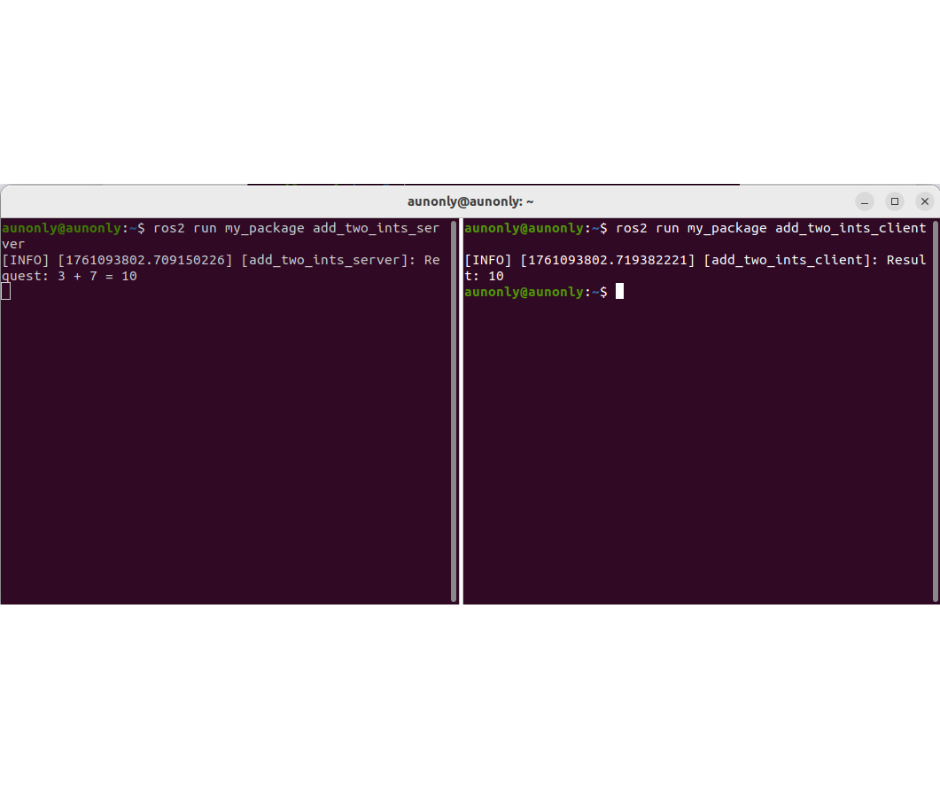
ทดสอบการทำงานของโหนด add_two_ints_server และ add_two_ints_client กับ AddTwoInts Service
ros2 run my_package add_two_ints_server
ros2 run my_package add_two_ints_client